Image Filters and Settings
Image filtering is one of the most fundamental operations of image processing and can greatly improve image quality and yield information that otherwise would have been missed. You should note that some filters are known for detecting or preserving edges, while others are typically used for smoothing or denoising. You should also note that filter performance is dependent both on the input image and on the parameters selected for filtering, such as kernel shape and size, iterations, and interpretation.
Sometimes the best results may be obtained by applying two or more filters sequentially. For example, you may need to preserve edges while smoothing uniform yet noisy areas. In the Image Processing panel, you can simply add sequential filtering operations to create a composite filter. However, you should be careful to note your order of operations as some filters may be contradictory and may not always be simply applied sequentially.
A number of image filters and image processing algorithms can be performed either on each XY-slice of the volume using a 2D kernel or on the whole volume using a 3D kernel. In some cases, it may be preferable to interpret the input data of an image processing algorithm as a sequence of 2D planes, either for performance or for a more appropriate outcome.
You can also easily create your own specialized filters with the Simple Dataset Filter Generator (see Generating Simple Dataset Filters). You can also browse for and download filters in the Infinite Toolbox (see Infinite Toolbox).
The tables below provide descriptions and the settings for the standard image filters available in Dragonfly and Dragonfly Pro. These filters are grouped in categories for easy reference.
These filters can be used to remove vertical and horizontal stripes, as well as stripes that appear in any direction, from image data. The destriping filters work by adding a pattern that interferes with the image to remove stripes, as shown in the example below for vertical destriping.
Original data (below left) and preview after destriping (below right)
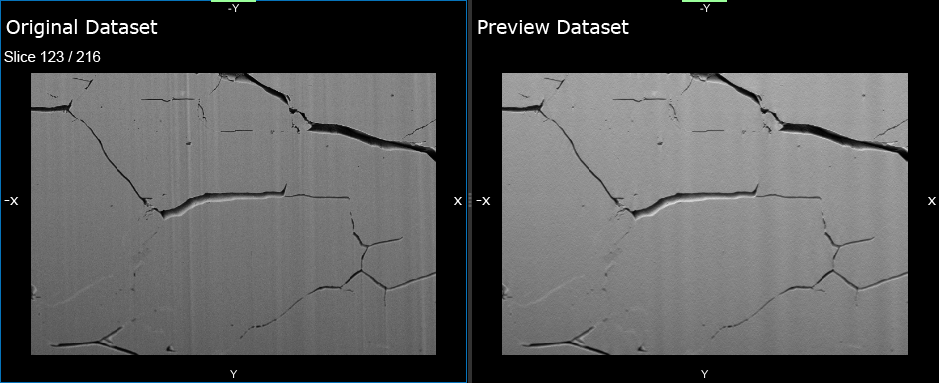
These filters are often used to correct artifacts found on FIB-SEM acquired data.
| Type | What it does | Settings | |
|---|---|---|---|
|
Arbitrary Angle Destriping |
2D |
Removes stripes that appear at an arbitrary angle, using the Fourier-Wavelet based method. |
Angle |
|
Horizontal Destriping |
2D |
Removes horizontal stripes, using the Fourier-Wavelet based method. |
Sigma foreground
|
|
Vertical Destriping |
2D |
Removes vertical stripes, using the Fourier-Wavelet based method.. |
Sigma foreground
|
These filters provide the option to process image data with deep learning models trained for tasks such as denoising, segmentation, and image enhancement (see Comprehensive Filters).
These filters can be used to adjust the contrast in images by remapping the grayscale or by recalculating the range of values in an image.
| Type | What it does | Settings | |
|---|---|---|---|
|
2D |
A variant of adaptive histogram equalization, CLAHE (contrast limited adaptive histogram equalization), prevents a tendency to over amplify noise in relatively homogeneous regions of an image by limiting amplification. In the case of CLAHE, the contrast limiting procedure is applied for each neighborhood from which a transformation function is derived. |
Clip
|
|
|
2D |
Remaps image intensities so that the output image uses the entire range available and there are approximately the same number of pixels of each value in the output image. |
- - |
|
|
2D |
Enhances images with low contrast by spreading out the most frequent intensity values. |
||
|
2D |
Recalculates the range of pixel values in an image so that it is equal to the maximum range for the data type. The purpose of this dynamic range expansion is usually to bring the image, or other type of signal, into a range that is more familiar or normal. |
- - |
|
|
2D |
Relies on the blurring effects of a Gaussian filter to quantify underlying local trends characterizing image intensity and balance contrast. This filter can remove vignetting artifacts quite effectively. |
Scale |
These filters emphasize the edges and transitions in an image.
| Type | What it does | Settings | |
|---|---|---|---|
|
2D |
Typically used to detect vessel-like or tube-like structures and fibers in volumetric image data. |
- - |
|
|
3D |
Typically used to detect vessel-like or tube-like structures and fibers in volumetric image data. |
Standard deviation |
|
|
Hessian |
2D |
Finds continuous edges in an image. Almost equal to the Frangi filter, this filter is implemented with an alternative method for smoothing. |
- - |
These filters emphasize the edges and transitions in an image.
| Type | What it does | Settings | |
|---|---|---|---|
|
2D |
Emphasizes the edges in an image using the Canny algorithm. |
Sigma |
|
|
DoG (Difference of Gaussian) |
2D |
Performs a Gaussian blur on an image at a specified standard deviation (first sigma). The resulting image is a blurred version of the source image. The module then performs another blur that blurs the image less than previously (second sigma). The final image is then calculated by replacing each pixel with the difference between the two blurred images and detecting when the values cross zero. The resulting zero crossings will be focused at edges or areas of pixels that have some variation in their surrounding neighborhood. |
First sigma
|
|
The Laplacian filter highlights the regions in which there is a rapid intensity change using a discrete convolution kernel that approximates the second derivatives of the image in the definition of the Laplacian. |
2D or 3D kernel |
||
|
2D |
Finds the horizontal and/or vertical edges of an image using the Prewitt transform. |
Direction (combined, vertical, or horizontal) |
|
|
2D |
Finds the horizontal and/or vertical edges of an image using the Scharr transform. |
Direction (combined, vertical, or horizontal) |
|
|
Emphasizes edges and transitions in an image. |
2D or 3D kernel |
Lets you create your own filter effects — smoothing, sharpening, intensifying, enhancing — with a customized 2D or 3D kernel for convolution.
| Type | What it does | Settings | |
|---|---|---|---|
|
2D/3D |
Convolves an image with a customized 2D or 3D kernel, which lets you create filter effects such as smoothing, sharpening, intensifying, enhancing. |
Kernel shape and size |
Two filters — Discrete Fourier Transform and Inverse Discrete Fourier Transform — are available for transforming time domain signals to the frequency domain and for inverting transformed signals.
The perfect invert-ability of the Discrete Fourier Transform is an important property for building filters which remove noise or particular components of a signals spectrum. Although frequency artifacts can be common in the result of a Fourier transform, these artifacts do not result in error in the inverted signal.
| What it does | |
|---|---|
|
Discrete Fourier Transform |
The Discrete Fourier Transform (DFT) takes a signal in the so-called time domain (where each sample in the signal is associated with a time) and maps it, without loss of information, into a frequency domain series, where each value is a complex number that is associated with a given frequency. The outputs of the DFT are the magnitude and phase information, as well as the real (even) and imaginary (odd) parts of the transform. |
|
Inverse Discrete Fourier Transform |
The Inverse Discrete Fourier Transform (IDFT) takes the frequency series of complex values and maps them back into the original time series. Assuming that the original time series consisted of real values, the result of the IDFT will be complex numbers where the imaginary part is zero. The required inputs of the IDFT are the magnitude and phase information. |
| Type | What it does | Settings | |
|---|---|---|---|
|
Entropy |
2D |
Detects subtle variations in the local gray level distribution. |
Disk
|
Morphological operators — dilate, erode, open, and close — can be applied through image filtering to grow or shrink image regions, as well as to remove or fill-in image region boundary pixels.
| Type | What it does | Settings | |
|---|---|---|---|
|
Returns an image containing the objects or elements of the input image that are smaller than the structuring element and darker than their surroundings (see also Top Hat Filters). |
|||
|
Performs a dilation operation, followed by erosion to smooth objects and fill in small holes. |
|||
|
Enlarges the boundaries of regions of foreground pixels, typically white pixels. |
|||
|
Erodes away the boundaries of regions of foreground pixels, typically white pixels. |
|||
|
Produces an image where each pixel value indicates the contrast intensity in the close neighborhood of that pixel. |
|||
|
Morphological Laplace |
2D/3D |
Enhances the edges of an image. The morphological Laplacian can be defined as half the sum of a morphological dilation and a morphological erosion with the same structuring element, minus the original image. |
|
|
Performs an erosion operation, followed by a dilation to smooth objects and remove isolated pixels. |
|||
|
Returns an image containing objects or elements of the input image that are smaller than the structuring element and brighter than their surroundings. See also Top Hat Filters. |
These filters — K-Means and Mini-Batch K-Means — can be used to partition an image into a specific number of meaningful regions.
Original data (below left) and preview after clustering (below right)

| Type | What it does | Settings | |
|---|---|---|---|
|
K-Means |
Clusters data by trying to separate samples in n groups of equal variance, minimizing a criterion known as the inertia or within-cluster sum-of-squares. This algorithm requires the number of clusters to be specified. Refer to https://scikit-learn.org/stable/modules/clustering.html for more information about K-Means clustering. |
Initialization |
|
|
Mini-Batch K-Means |
The Mini-Batch K-Means option is a variant of the K-Means algorithm which uses mini-batches to reduce computation times, while still attempting to optimize the same objective function. Mini-batches are subsets of the input data, randomly sampled in each training iteration. In contrast to other algorithms that reduce the convergence time of K-Means, Mini-Batch K-Means produces results that are generally only slightly inferior to the standard algorithm. Refer to https://scikit-learn.org/stable/modules/clustering.html for more information about this variation of the K-Means clustering. |
Initialization |
These filters can be used to correct undesirable shading across the field-of-view, which can be a prominent phenomenon in microscopy and may occur due to non-uniform illumination, inhomogeneous detector sensitivity, or non-specific sample staining,
| Type | What it does | Settings | |
|---|---|---|---|
|
Histogram Balancing |
2D |
Spreads out the most frequent intensity values in an image. The equalized image has a roughly linear cumulative distribution function. |
Reference slice |
|
2D |
Corrects non-uniform illumination and counteracts noise by reducing randomness. |
||
|
2D |
Uses a radial basis function to correct image shading. You should note that the Manual RBF filter requires at least three(3) seed points in representative regions and that corrections are applied in the X and Y axes only. If corrections are required in another direction, you will need to transform the data (see Inverting Datasets). |
Kernel size
|
|
|
2D |
Uses a third degree polynomial to correct uneven shading. |
Polynomial degree
|
* Available only for Dragonfly Pro. Contact Object Research Systems (ORS) Inc. for information about the availability of Dragonfly Pro.
These filters can be used to emphasize the details in an image and enhance the edges of objects.
| Type | What it does | Settings | |
|---|---|---|---|
|
Effectively blurs or smoothes images by allowing high frequency image information to pass through and blocking low frequency image information. This effectively sharpens the image. |
|||
|
Sharpens an image by subtracting a blurred version of itself from the original. |
Kernel size
|
These filters can be applied to reduce the amount of noise in an image.
| Type | What it does | Settings | |
|---|---|---|---|
|
Anisotropic Diffusion |
2D |
Anisotropic diffusion is a generalization of this diffusion process as it produces a family of parameterized images, but each resulting image is a combination between the original image and a filter that depends on the local content of the original image. As a consequence, anisotropic diffusion is a non-linear and space-variant transformation of the original image. Anisotropic diffusion generally preserves the sharpness of edges better than Gaussian blurring. |
Option |
|
Bilateral |
2D |
This edge-preserving and noise reducing denoising filter averages pixels based on their spatial closeness and radiometric similarity. |
Sigma color
|
|
Smoothes or blurs an image by performing a convolution operation with a Gaussian filter kernel. |
|||
|
Kuwahara |
2D |
Provides non-linear smoothing for adaptive noise reduction. Most filters that are used for smoothing are linear low-pass filters that effectively reduce noise, but can also blur out the edges. However, the Kuwahara filter is usually able to apply smoothing on the image while preserving its edges. |
|
|
Maximum |
Replaces each pixel in the image with the largest pixel value in that pixel’s neighborhood. This grayscale dilation can help reduce pepper noise. |
||
|
Smoothes images and diminishes noise by replacing each pixel with the mean value of its neighbors. |
|||
|
2D |
Mean shift filtering is based on a data clustering algorithm commonly used in image processing and can be used for edge-preserving smoothing, |
Kernel size |
|
|
Smoothes images by replacing each pixel with the median value of its neighbors. Can be very effective on salt-and-pepper noise, without the smoothing effects that can occur with other smoothing filters. |
|||
|
Minimum |
|
Replaces each pixel in the image with the smallest pixel value in that pixel’s neighborhood. This grayscale erosion can help reduce salt noise. |
|
|
Smoothes images by taking a mean of all pixels, weighted by how similar the pixels are to the target pixel.
|
Kernel size
|
||
|
Percentile |
2D/3D |
Percentile filtering is a well known non-linear technique for filtering images in which each pixel in the image is replaced by the value of that point in the histogram of its neighbour pixels that corresponds with a selected percentile. Percentile filtering includes minimum and maximum filtering (grey-value erosion and dilation) and median filtering. It is very suitable for background estimation and removal of outliers without degrading the image. NOTE The median filter corresponds to the case where the percentile selected is 50. |
Kernel shape and size |
|
Rank |
2D/3D |
Is a non-linear local filter that proceeds by ordering the pixels in a neighborhood and selecting a given ranked entry. |
Kernel shape and size |
| Tv_bregman |
2D/3D |
Performs total-variation denoising using a split-Bregman optimization. Total-variation denoising minimizes the total variation of an image, which can be roughly described as the integral of the norm of the image gradient. Refer to http://en.wikipedia.org/wiki/Total_variation_denoising for more information about the principle of total-variation denoising. |
Weight |
|
Tv_chambolle |
2D/3D |
Performs total-variation denoising on n-dimensional images. NOTE The code for the Tv_chambolle filter is an implementation of the algorithm of Rudin, Fatemi and Osher that was proposed by Chambolle in An algorithm for total variation minimization and applications, Journal of Mathematical Imaging and Vision, Springer, 2004, 20, 89-97. |
Weight |
|
Wavelet |
2D |
Performs a wavelet transform, using the selected wavelet function, which is characterized by a width parameter and length parameter. |
* Available only for Dragonfly Pro. Contact Object Research Systems (ORS) Inc. for information about the availability of Dragonfly Pro.
Texture analysis characterizes the texture of a region by quantifying spatial variation in pixel intensities.
| What it does | Settings | |
|---|---|---|
|
Gabor |
Separates elements with oriented patterns. |
Frequency
|
|
Image Moments |
Separates elements with different textures. |
Kernel |
|
Local Binary Pattern |
Separates elements with different textures. |
Angular count
|
|
Membrane Projections |
Enhances membrane-like structures of an image through directional filtering. |
Kernel size |
Thresholding filters output an image composed of two basic classes — foreground and background. These images can be used as masks for segmentation purposes or for other image processing tasks.
| What it does | Settings | |
|---|---|---|
|
Applies an adaptive threshold to images. |
||
|
Adaptive Gaussian |
The threshold value is the weighted sum of neighbourhood values where weights are a Gaussian window. |
Threshold type |
|
Return threshold value(s) based on ISODATA method. That is, returned thresholds are intensities that separate the image into two groups of pixels, where the threshold intensity is midway between the mean intensities of these groups. |
- - |
|
|
Implements Li's Minimum Cross Entropy thresholding method. |
- - |
|
|
Local Otsu |
Performs local Otsu thresholding on an image, with a user-specified kernel size. Facilitates the threshold-segmentation of images with uneven illumination, without the need for background normalization, and for which global thresholding is inadequate. |
Kernel size |
|
Mean |
Selects the threshold as the mean of the local greyscale distribution. |
- - |
|
Minimum |
Selects the threshold as the minimum of the local greyscale distribution. |
- - |
|
Niblack |
Applies a Niblack local threshold to an array. Instead of calculating a single global threshold for the entire image, several thresholds are calculated for every pixel by using specific formulae that take into account the mean and standard deviation of the local neighborhood (defined by a window centered around the pixel). NOTE Refer to Niblack, W (1986), An introduction to Digital Image Processing, Prentice-Hall for more information. |
Window size |
|
Otsu's threshold clustering algorithm searches for the threshold that minimizes the intra-class variance, defined as a weighted sum of variances of the two classes. |
- - |
|
|
Sauvola |
Uses a modification of the Niblack technique. |
Window size |
|
Triangle |
Returns a threshold value based on the triangle algorithm. |
- - |
|
Implements Sauvola's thresholding method, which is a variation of Niblack's method. |
- - |